NUrbs fitting
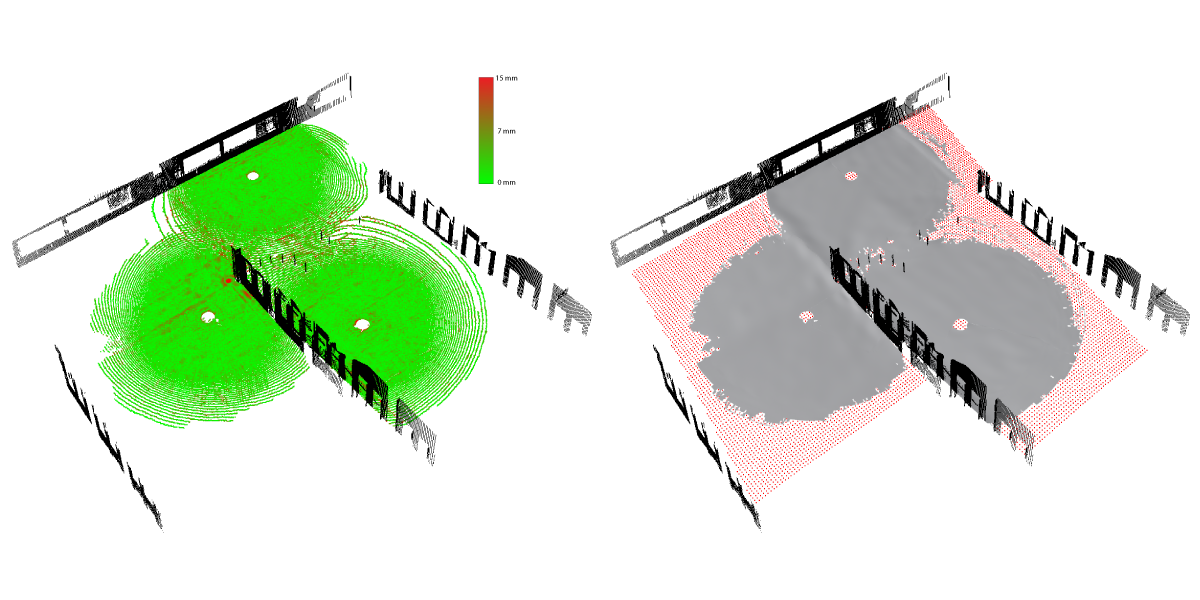
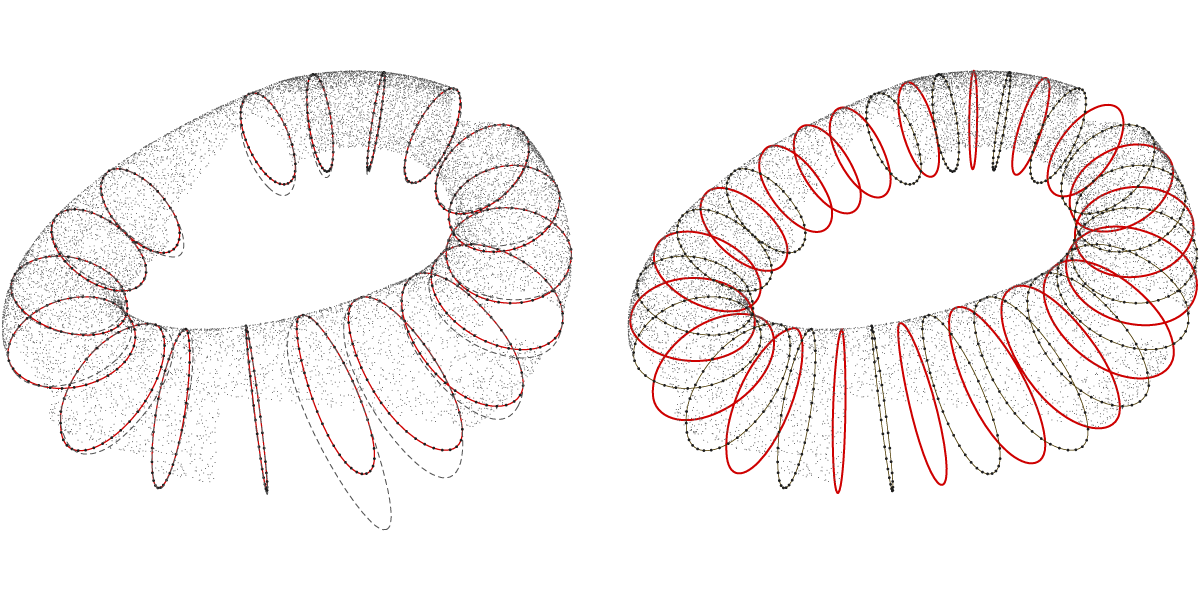
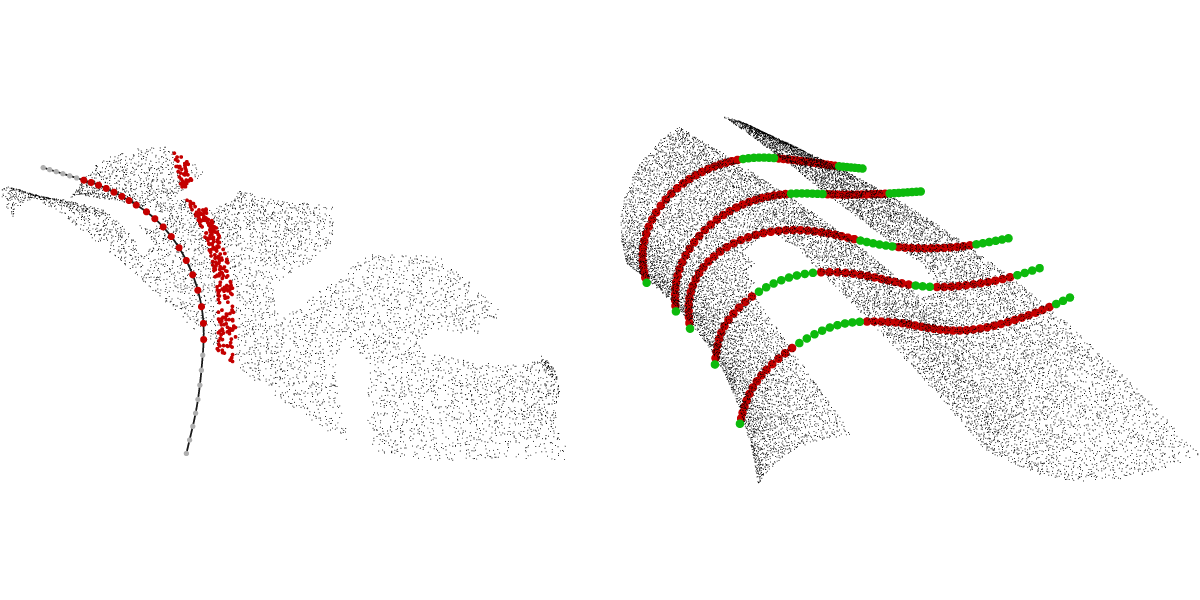
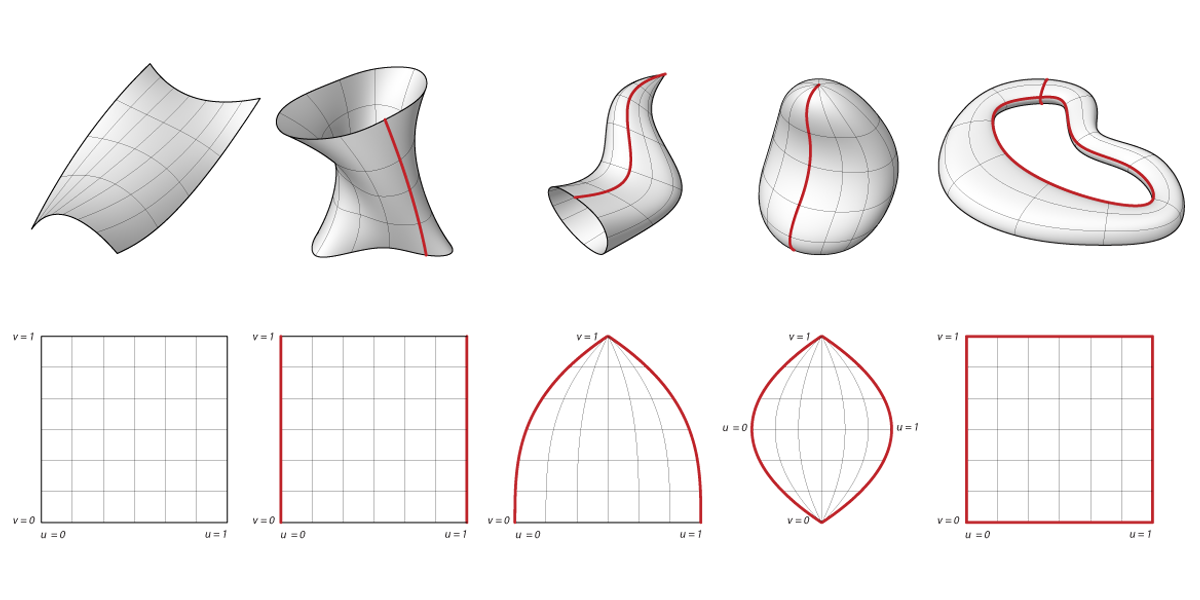
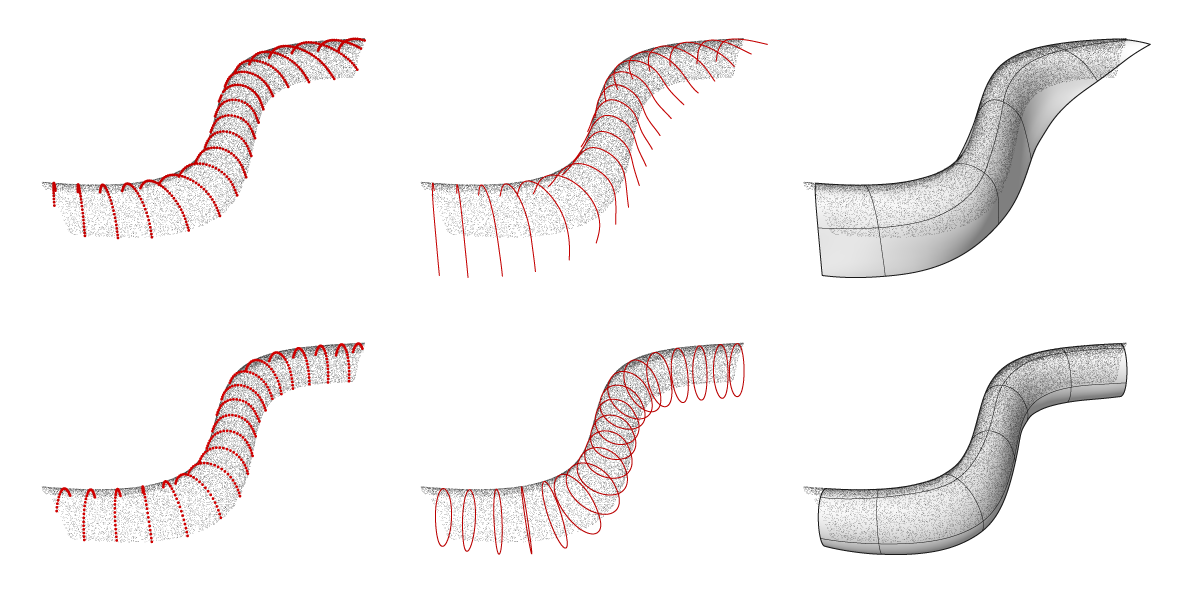
Automatic generation of Building Information Models requires powerful tool for mapping real world objects to closed surface geometry. In general, this task is referred to reverse engineering and is common in computer graphics. In the context of abundant laser scanning and image-based reconstruction data, we focus on the translation of 3D point cloud sets into manageable geometric descriptions such as meshes, primitives, or parametric surfaces. Most suitable for engineering applications are Non-Uniform B-Spline (NURBS) curves and surfaces, as they offer precise modeling control, descriptive flexibility (ability to construct conics), and a modeling logic that is in tune with fabrication considerations. However, existing automated techniques to fit NURBS to point clouds are limited. They either fail to account for all the topological variations (singly/doubly open/closed) or struggle with imperfections in the input data (incomplete and noisy). This task is made even more difficult when point clouds are unorganized and the mapping of point to parameter becomes non-trivial. We present a novel algorithm for automatic fitting of NURBS surfaces to unorganized point clouds in the presence of noise and incomplete data. Assuming the input can be represented by a single NURBS surface of unknown topology, the procedure will automatically output an accurate fitted surface. Ongoing extensions explore possible application the interactive modeling in various CAD platforms. Validation is carried out on real and synthetic data sets from the computer vision community as well as data sets from the built environment generated by laser scanning and vision-based reconstruction.
Share this
Products
We have released the point cloud datasets together with their ground-truth, as described in our paper:
[T1 Dataset] [Groundtruth for T1 Dataset]
[T2 Dataset] [Groundtruth for T2 Dataset]
[S1 Dataset] [Groundtruth for S1 Dataset]
[S1 Dataset] [Groundtruth for S1 Dataset]
[Z1 Dataset] [Groundtruth for Z1 Dataset]
Our point cloud dataset includes three real world models generated from registered laser scans as well as two synthetic model (S1 and S2) with a point distribution that mimics multiple scans. Each model is formatted as an ASCII TXT file. Additionally, a collection of TXT files containing 3D point coordinates is provided. Each file represents one ground truth segment of the reference model.
THIS DATA SET IS PROVIDED "AS IS" AND WITHOUT ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
CODE
Our code will be released upon acceptance of the paper under review...please stay tuned
publication
Coming soon...