

Segmentation
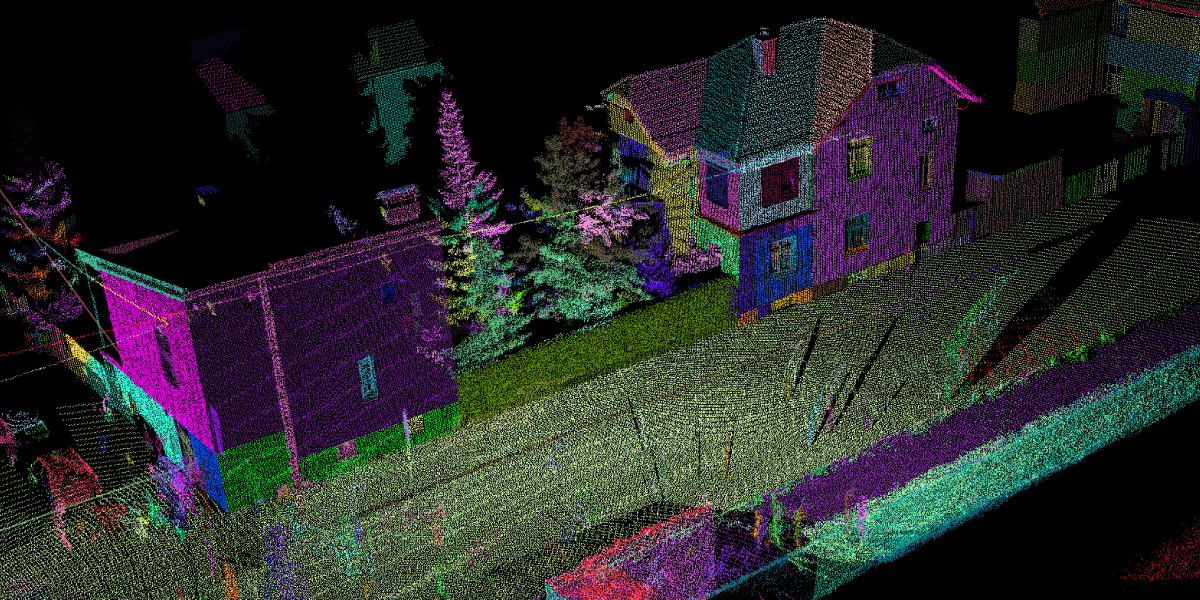
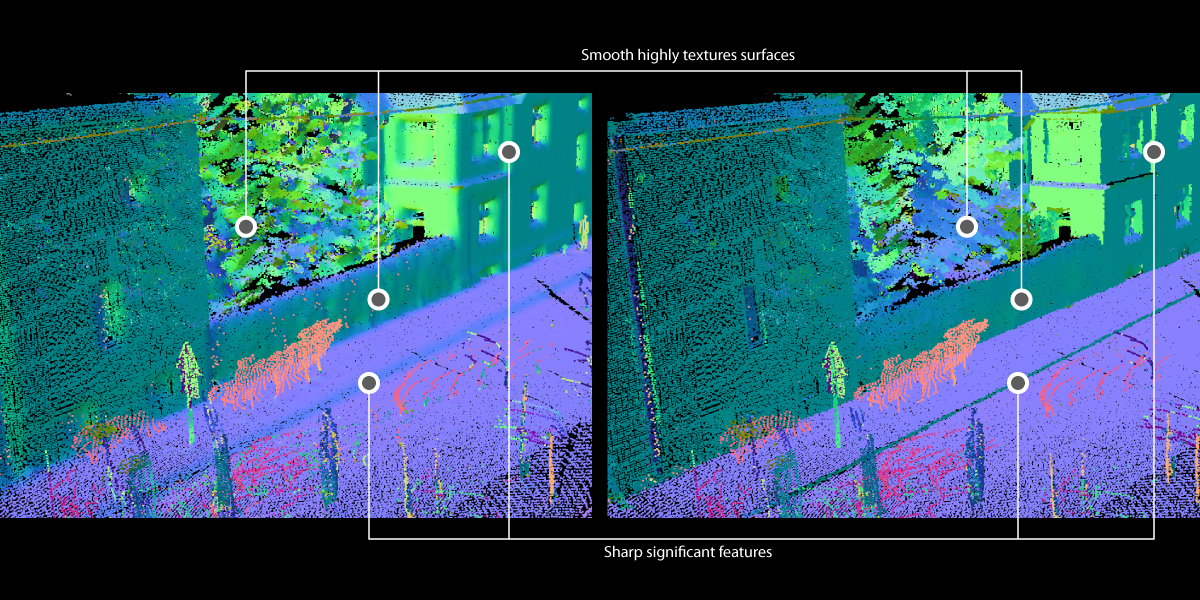
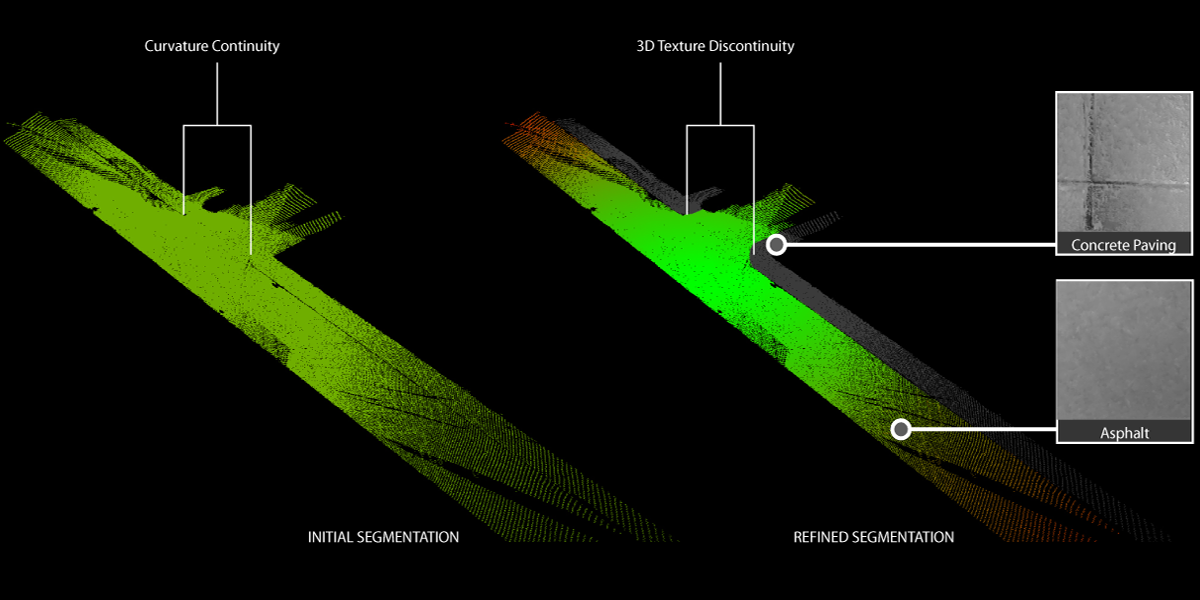
Accurate and rapidly produced 3D models of the as-built environment can be significant assets for a variety of Engineering scenarios. Starting with a point cloud of a scene -- generated using laser scanners or image-based reconstruction methods -- the user must first identify collections of points that belong to individual surfaces, and then, fit surfaces and solid geometry objects appropriate for the analysis. When performed manually, this task is often prohibitively time consuming and, in response, several research groups have recently focused on developing methods for automating the modeling process. Due to the limitations of the data collection processes as well as the complexity of as-built scenes, automated 3D modeling still presents many challenges. To overcome existing limitations, in this work, we propose a new region growing method for robust context-free segmentation of unordered point clouds based on geometrical continuities. No assumptions are made about the intent of the segmentation it applies to a large context of engineering analysis. In our method, the user sets a single parameter, treated as a locally adaptive threshold, which accounts for the desired level of abstraction. Segmentation starts with a multi-scale feature detection, describing surface roughness and curvature around each 3D point, followed by seed finding and region growing steps. Preliminary experimental results from seven challenging scenes of the built environment demonstrate that our method can account for variability in point cloud density, surface roughness, curvature, and clutter within a single scene.
Share this
Products
Results

Dataset
We have released the point cloud dataset together with their ground-truth, as described in our paper:
[T1 Dataset] [Groundtruth for T1 Dataset]
[T2 Dataset] [Groundtruth for T2 Dataset]
[TR1 Dataset] [Groundtruth for TR1 Dataset]
[TR2 Dataset] [Groundtruth for TR2 Dataset]
[TR3 Dataset] [Groundtruth for TR3 Dataset]
[TR4 Dataset] [Groundtruth for TR4 Dataset]
[S1 Dataset] [Groundtruth for S1 Dataset]
[Z1 Dataset] [Groundtruth for Z1 Dataset]
Our point cloud dataset includes seven real world models generated from registered laser scans as well as one synthetinc model (S1) with a point distribution that mimics multiple scans. Each model is formatted as an ASCII TXT file. Additionally, a collection of TXT files containing 3D point coordinates is provided. Each file represents one ground truth segment of the reference model.
THIS DATA SET IS PROVIDED "AS IS" AND WITHOUT ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
Code
Our code will be released upon acceptance of the paper under review...please stay tuned
publication
Dimitrov, Andrey, and Mani Golparvar-Fard. "Segmentation of building point cloud models including detailed architectural/structural features and MEP systems." Automation in Construction 51 (2015): 32-45. [link]